工业原子力显微镜快速进针系统的设计
工业原子力显微镜快速进针系统的设计
王谦 许广路 薛虹 殷伯华 初明璋 方光荣
(中国科学院电工研究所,北京市生物电磁学重点实验室,北京,100190)
摘要 为了满足工业原子力显微镜高效检测的要求,提出了一种粗细相结合的自动进针方法。设计了快速的粗进针和慢速的精细进针二级进针控制系统硬件结构。针对工业半导体样品的特点,通过预标定方法保证粗进针动作快速到位。在精细进针阶段采用升降台步进动作和实时闭环检测,当检测到激光信号变化的值超过setpoint值时,完成进针操作。通过实验测试表明该方法有效减少了进针时间,提高了原子力显微镜的进针效率。
关键词 原子力显微镜;进针控制;激光检测;PC-104控制器
中图分类号 TH742
Design of Industrial AFM Fast Tip Approach System
Wang Qian, XuGuanglu, Xue Hong, Yin Bohua, Chu Mingzhang,Fang Guangrong
(Beijing Key Laboratory of Bioelectromagnetics, Institute of Electrical Engineering, Chinese Academy of Scineces, Beijing, 100190, China)
AbstractIn order to meet the industrial requirements for the efficient test of atomic force microscope, a fast tip approach method composed of rough approach and fine approach method is introduced. The hardware controlling system for the two level approaching including rough and fine section wasdesigned. According to the characteristics of the semiconductor industry sample, rough approach movement wasdone by the pre-calibration method. Stage step moving and close-loop real-time detection were acted during the fine tip approaching.When the laser signal value exceeds the value of setpoint, the approaching process is finished. Experiments showed that this method is effective to reduce the approaching timeand to improve the efficiency.
Key words AFM; Approaching control; Laser detection; PC-104 controller
原子力显微镜(Atomic Force Microscope, 缩写AFM)具有原子级分辨率,可以观察导体、半导体、绝缘体、甚至是活体生物样品的表面形貌[1],由于这些特点,AFM目前已广泛应用于表面科学、材料科学、生命科学等领域。在AFM的研制中,如何使探针快速有效的与样品表面接触是一个需要首先考虑的问题,传统的AFM进针方式是人工或者机器操作电机使探针一步一步的靠近样品表面,这种进针方式效率低下、操作复杂,降低了AFM的实用程度。自动进针很好的弥补了上述缺点,进针过程分两步进行:第一步是快速的粗进针,使用电机控制压电陶瓷或者样品台从较远位置(大于1mm)快速移动到预定的较近位置(20μm到200μm之间);第二步是慢速的细进针,使用高速响应电机以微小步距(小于1μm)移动,每移动一步检测一次样品与探针能否接触,当检测到两者接触时停止移动,即完成了整个自动进针过程。
近年来,国内外的许多专家学者对如何自动进针做了很多有意义的实践。中国科学院沈阳自动化研究所的周磊、于鹏等研究人员采用激光限位开关设计了一种面向纳米观测及纳米操作的无损自动逼近装置[2];中国科学院电工研究所的陈代谢、殷伯华等研究人员提出了一种基于光纤传感的快速无损进针方案[3],但该方式光纤传感器检测点与AFM针尖位置不能实现重合。美国的Prater Craig、Su Chanmin等人通过摄像头自动聚焦的方式实现[4],为AFM的自动进针提供了新的思路。
课题组承担了国家高技术研究发展计划(863计划)——“工业型扫描探针显微镜测试系统及关键技术”中的“AFM快速扫描控制技术”的部分任务。本文针对这一课题,结合项目实际情况设计了一种新型的自动进针方法,并通过实验方案得到了验证。
1. 系统硬件描述
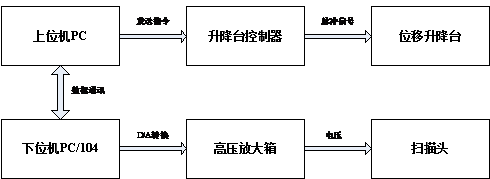
自动进针主要由上下位机、位移升降台、升降台控制器、高压放大模块和扫描头相互协作完成。每个部分在AFM中都有重要的作用:上位机是使用者直接操作的计算机,一般是PC,用户直接通过在上位机操作,向下位机发送命令,实现某些操作。下位机接收上位机发送的指令,根据此命令译成相应的时序信号直接控制相应设备,并获取相应设备的运行状态,一般是PLC或单片机。位移升降台用于摆放样品,内含有高精度移动的步进电机,负责推动样品升降,让探针与样品靠近或者远离。升降台控制器用来给步进电机提供脉冲驱动信号。高压放大模块用于给压电陶瓷提供电压。扫描头[6,7]是AFM的核心组件,探针、PSD、压电陶瓷全部都安装在扫描头上,工作性能良好的扫描头是AFM扫描成像的最重要的因素之一,选用扫描头的时候主要需要考虑的问题是扫描范围、谐振频率、稳定性等因素。上述组件之间的关系如图1所示。
|
图1AFM系统框图
|
现分别对这几个部分进行介绍。
1.1 上下位机及其通讯
与其它上位机不同的是,本文讨论的AFM系统中上位机还负责控制升降台,该系统中的上位机即PC。下位机采用16位的PC/104工业总线控制标准[5],PC/104具有尺寸小、堆栈式连接、轻松总线驱动的优点,并安装puppy linux系统,该系统的优点是小巧轻便,软件资源丰富。上下位机通过TCP/IP协议通讯,相对于串口通讯,采用TCP/IP协议传输不受距离限制,传输速度快。
1.2 升降台及其控制器
升降台采用北京卓立汉光仪器有限公司开发的KSAV2030-ZF高精密电控升降台。KSAV2030-ZF升降台用于竖直方向上的升降,行程30mm,最大运动速度6.5mm/sec,最小步距0.4μm(即以最小步距移动,从零位到最大行程共需75000步),重复定位精度小于等于5μm。由于AFM探针通常为几个到十几个微米,因此AFM自动进针要求升降台的定位精度要足够高,运行要足够平稳,
以免样品倾斜或者抖动,尽可能的减少探针和样品的磨损,所选择的KSAC2030-ZF升降台能较好的满足课题要求。
控制器采用卓立汉光公司生产的配套位移台控制箱SC300-1B。该控制箱采用RS232接口协议,可方便的通过串口与计算机进行连接,使用简便。工作模式选择模式6:相对(用户)位置,即显示参数为相对(用户)位置参数, 单位为脉冲数量,参考点为用户原点。在这种模式下,控制器每给一个脉冲,升降台就上升或者下降0.4μm,保证升降台的精确移动。上述两者相互配合即可以以较快速度快速升降样品,又能够以0.4μm的微小步距让探针与样品缓慢逼近,满足自动进针的使用需求。
1.3 高压放大箱
高压放大箱接收下位机的命令,给压电陶瓷提供-200V~200V的电压,采用APEX公司出品的PA15FL芯片,将-10V~10V的电压放大至所需的范围。PA15FL是一款性能强大的高压放大芯片,常用于压电定位领域,具有电压范围广、静态电流低、损耗低的优点。
1.4 扫描头
扫描头采用安捷伦公司生产的N9521A,该扫描头在X、Y方向的扫描范围均为90μm,z方向上下移动范围为7μm,工作性能稳定,误差小。课题任务要求X、Y方向行程50μm~100μm,分辨力≤1nm,Z方向行程15μm,分辨力≤0.1nm。综合扫描范围、扫描精度、稳定性等方面因素考虑,选用该型号扫描头。
2. 自动进针设计方案
本文依靠实验室现有系统,设计了一种自动进针方案,操作简便,有效提高了进针效率。
2.1 AFM原理
AFM的原理如图2所示,针尖固定在悬臂梁上,激光发射器发出激光,经过悬臂反射后被四象限光电检测系统PSD[8]接收。针尖在样品表面探测时,样品表面的不平整性导致针尖发生偏转,反射后的激光信号随之偏转,打在光电检测器上的光点也发生相应的位移,PSD将自动进针的发射后的激光的偏转量转化成电信号,送往计算机进行处理,即可得到样品表面二维或者三维的成像数据。AFM自动进针过程依赖于其原理,整个进针分为粗进针和细进针,现分别对其进行介绍。
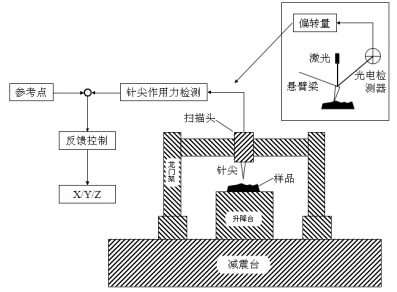
图2AFM原理图
2.2 粗进针设计方案
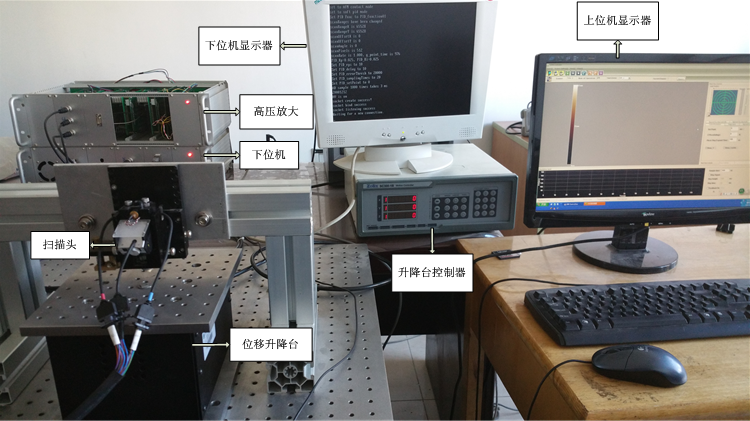
粗进针的实现方式是对位移台进行标定,标定出粗进针阶段位移升降台需要上升的距离。系统装置图如图3所示,标定方法如下:(1)将扫描头固定到龙门架上,并将激光光点调节到四象限的中心附近位置,设置setpoint点;(2)将升降台上升1.8cm,移动到距离探针较近的位置;(3)手动操作升降台向上升起,直至探针与样品接触,记录步进电机走的步数,再将其换算成微米。采用同一探针在不同的时间进行重复实验,结果如表1所示;(4)更换探针,每个探针进行5次进针,计算平均距离,继续重复上述实验,结果如表2所示。
|
表1 探针与样品表面的距离
|
次数 |
1 |
2 |
3 |
4 |
5 |
平均 |
|
距离(μm) |
1158.4 |
1166 |
1169.2 |
1170.8 |
1156 |
1163.6 |
表2 不同探针与样品表面的距离
|
探针 |
1 |
2 |
3 |
|
平均距离(μm) |
1113.2 |
1190.1 |
1110 |
从上述实验结果可知,在该AFM系统中,从初始位置到探针样品两者接触需要升高约1200μm,设定粗进针完毕探针与样品之间距离200μm,因此在粗进针中让升降台上升1000μm即可。
2.3细进针设计方案
2.3.1 细进针原理
升降台在上升的过程中,当探针与样品接触时,针尖也会发生偏转,反射到PSD上的激光信号值会发生跳变。PSD采集的激光信号用四象限表示,如图4所示,各个象限的激光信号的强度用A、B、C、D表示,单位mV。
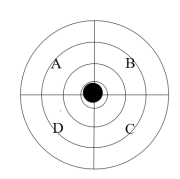
图4激光信号四象限采集图
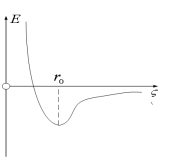
图5 探针样品作用力曲线图
我们使用公式(1)表征激光点的上下偏移情况,t-b表示top-bottom,其值可通过软件界面直接查看:
t-b=(A+B-C-D)/(A+B+C+D) (1)
激光初始位置在四象限的中心点,t-b的初始值约为0,setpoint即参考点,setpoint的值越大,代表进针完毕后压针就越严重。用公式(2)来判断进针是否停止:
△ = t-b-setpoint (2)
由于t-b的初值约为0,因此Δ初值为负。探针与样品接触时,激光信号发生偏转,光点向上偏移,对应的A、B象限的值增大,C、D象限的值减小,t-b的值增大,当t-b的值增大到一定程度时,Δ符号发生改变,此时可判断进针到位。但是由于针尖分子与样品分子之间存在范德华力和排斥力,两者之间的作用力如图5所示。当针尖与样品距离较远时,范德华力起主要作用;当针尖与样品距离较近时,排斥力起主要作用。因此,在探针与样品逐渐接触的过程中,当两者即将接触时,在范德华力的作用下,两者会吸引到一起造成激光信号的偏转,导致t-b值增大,t-b的值发生跳变。当t-b的值大于setpoint点时,△的值由负值跳变为正值,符号发生改变。此时探针与样品的接触轻微,处于不稳定状态,需要继续进针一小段距离保证探针与样品的完全接触。因此,为减小范德华力对进针的影响,setpoint值不宜设置的过小。
2.3.2 细进针设计方案
基于上述原理,细进针方案设计如下,升降台每隔15ms(上下位机的通讯时间为12ms)上升0.4μm,同时向下位机发送指令,下位机开始监测激光信号值是否发生跳变。升降台每上升0.4μm后停止,等待下位机读取激光信号值,若△没有发生跳变,则升降台继续向上移动,若△由负值跳变为正值,下位机发送指令给上位机指令,停止进针。整个进针过程用图6表示:
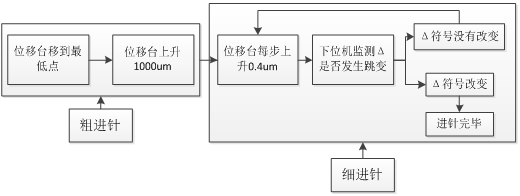
图6 AFM自动进针流程图
3. 实验验证
依照上述方案进行了实验测试,扫描样品为150nm深的标准光栅样品。步骤如下:(1)给压电陶瓷施加50%(0V)的电压,为其伸长缩短留下足够的余量,避免压电陶瓷饱和的情况;(2)调节t-b的值,使其尽可能的接近0;(3)设定setpoint值为800mV,将升降台移动到初始位置;(4)点击上位机界面的“自动进针”按钮,开始自动进针。同时记录进针时间,多次重复测试,整个进针过程可在20s内完成。进针完毕后,打开图3所示的激光位置显示窗口观察激光位置,发现激光光点已经偏离了中心位置,说明探针与样品已经接触。为观察探针是否完好,退针后将探针放到显微镜下观察,发现探针完好,说明该方案较好的完成了自动进针任务。
4. 结论
本文针对“AFM快速扫描控制技术”这一课题,结合系统的硬件结构,提出了一种快速自动进针方案,简化了AFM的自动进针过程。和其它进针方式相比,这种方式有效提高了AFM进针速度。实验结果表明这种设计方案切实可行,解决了制约工业AFM扫描成像过程中进针环节速度慢的不利影响,对高速AFM的研制也具有良好的应用价值。
本研究工作是在国家自然科学基金面上项目:51375470和863计划:2012AA041204等的支持下完成的。
参考文献
[1] Bohua Yin, Daixie Chen, YunshengLin , etc. Large Scanning Range and Rapid AFM for Biological Cell Topography Imaging[J], Key Engineering Materials, 697-700, 2013.
[2] 周磊,于鹏,董再励等 一种面向纳米观测及纳米操作无损自动逼近装置
实用新型专利[P],授权号200920248669.7 日期:2009.11.25
[3]Daixie Chen, Bohua Yin, Yu Ju, etc. AFM fast tip approach based on fiber optic sensor [J], Key Engineering Materials, 1008-1013, 2014.
[4] P Craig,CR Meyer,etc. CANTILEVER ARRAY SENSOR SYSTEM[P];WIPO Patent Application WO/2003/038409
[5] 周鹏,卫星 PC-104在电机控制中的应用[J] 现代科学仪器,p 98-101,2013
[6] 陈注里,李英姿等 原子力显微镜的几种成像模式简介[J] 电子显微学报;p178-186;2013。
[7] 徐井华,李强 原子力显微镜的工作原理及其应用[J] 通化师范学院学报;p 22-24,2013
[8] 董晓坤 高速原子力显微镜的成像方法研究[D]南开大学;p15-23,2012

关注本网官方微信 随时订阅权威资讯
