基于ADAMS的弹齿滚筒捡拾器运动仿真与分析
基于ADAMS的弹齿滚筒捡拾器运动仿真与分析
王述洋* 贾宝建 崔金磊 苏君
(东北林业大学机电工程学院 哈尔滨 150040)
摘 要 为解决收获后的农业秸秆拾取处理问题,研究了一种牧草捡拾装置常用的弹齿滚筒捡拾器。我们介绍了捡拾器的工作原理,运用 SolidWorks 三维建模软件建立简化的弹齿滚筒捡拾器实体模型。运用ADAMS多体运动仿真软件对模型机构进行了运动仿真,得出了弹齿的运动轨迹和力学曲线。对曲线进行了一定的推理分析,为研究如何设计出适用于农业秸秆拾取的捡拾器提供理论依据。
关键词 弹齿滚筒捡拾器 ADAMS 运动分析
中图分类号 S225.2+3
Dynamic Simulation and Analysis of Spring-finger Cylinder Pickup Collector based on ADAMS
Wang Shuyang*,Jia Baojian,Cui Jinlei,Su Jun
(College of Mechanical and Electrical Engineering,Northeast Forestry University,Harbin 150040,China)
Abstract To solve the problems of agricultural straw picking processing after harvest, we studied a kind of tooth cylinder pickup used by grass collecting device. We introduced the working principle of pickup collector. A simplified model of cylinder pickup collector was established by SolidWorks. We used ADAMS to analysis the mechanical curve and path of motion. The text provide a reference for design of pickup collector which used by collecting the agricultural straw.
Key words Cylinder pickup collector;ADAMS;Motion analysis
弹齿滚筒式捡拾装置主要应用于牧草与农业秸秆的收集,影响拾取质量的主要因素包括弹齿的轨迹、速度、加速度及弹齿的运动姿态等都与定向导轨有着直接的关系[1]。定向导轨一般设计成凸轮盘,因此必须合理设计凸轮盘滑道形状并与其他相关部件保持协调关系才能保证捡拾质量[2]。现有的弹齿滚筒捡拾装置主要是为捡拾牧草设计的,因此不能直接用于捡拾农业秸秆。本文分析研究一种弹齿滚筒捡拾器有助于设计出适用于收集农业秸秆的捡拾器。
SolidWorks软件具有强大的三维建模功能,利用该软件对简化的捡拾机构主要零部件建模,并进行装配和运动干涉检验。将模型导入ADAMS软件中进行运动仿真,分析其运动轨迹及力学曲线。
1 捡拾器的工作原理
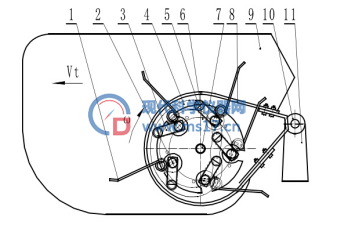
图1 弹齿滚筒式捡拾装置结构图
Fig.1 Structure of spring-finger cylinder pickup collector
1 弹齿 2 弹齿杆 3 曲柄 4 凸轮盘 5 滚轮 6 滚筒盘
7 中间轴 8 滚筒护板 9 侧护板 10 悬挂轴 11 支架
中间轴的两端固定着滚筒盘,并随中间轴旋转,周向均布的弹齿杆用轴承支承在滚筒盘的孔中,弹齿沿轴向并排固定在弹齿杆上,具有特殊形状的凸轮盘固定在弹齿盘外侧的支承板上。带有滚轮的曲柄固定在弹齿杆端部,当滚筒盘旋转时弹齿杆带动滚轮沿凸轮盘定向滑道滚动,以控制弹齿按一定的轨迹运动。当弹齿运动至滚筒下方时,弹齿从护板内伸出,捡拾牧草并把它升运至输送喂入器。当弹齿运动至滚筒上方时,弹齿推送物料并从草层中顺利缩回。为了避免牧草缠绕滚筒,其上装有用钢板制成的滚筒护板;沿轴向两滚筒护板之间的间隙可以使弹齿顺利通过[3]。
弹齿滚筒式捡拾装置是一个反转后的摆动从动件盘形凸轮机构[4]。 为机器的前进速度,
为机器的前进速度, 为滚筒盘的回转角速度。捡拾装置工作时,弹齿随滚筒在绕回转中心匀速转动的同时,还随联合机沿水平方向匀速前进,由于弹齿运动还受到凸轮盘滑道廓线的控制,弹齿还相对于滚筒摆动[5]。综上所述,捡拾器的弹齿在捡拾物料时,是一个合成运动:弹齿跟随滚筒的转动,弹齿与曲柄相对于滚筒的摆动,机器前进的运动。
为滚筒盘的回转角速度。捡拾装置工作时,弹齿随滚筒在绕回转中心匀速转动的同时,还随联合机沿水平方向匀速前进,由于弹齿运动还受到凸轮盘滑道廓线的控制,弹齿还相对于滚筒摆动[5]。综上所述,捡拾器的弹齿在捡拾物料时,是一个合成运动:弹齿跟随滚筒的转动,弹齿与曲柄相对于滚筒的摆动,机器前进的运动。
2 捡拾器的建模与仿真
本论文建模采用纽荷兰-850型圆捆机捡拾装置,基本参数:滚筒半径R=106mm、曲柄长度l=64mm、弹齿长度lˊ=192mm、弹齿与曲柄夹角 、滚子半径r=17.5mm、基圆半径R0=71mm;凸轮轨道轮廓线形状为豆形,其中包括三段圆弧和一段直线,四段样条曲线之间光滑连接,凸轮轨道轮廓线形状如图2所示。
、滚子半径r=17.5mm、基圆半径R0=71mm;凸轮轨道轮廓线形状为豆形,其中包括三段圆弧和一段直线,四段样条曲线之间光滑连接,凸轮轨道轮廓线形状如图2所示。
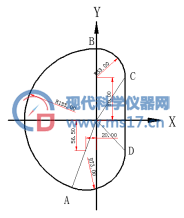
图2 凸轮轨道轮廓线形状
Fig.2 Contour shape of the cam
图2所示的直线型轨道曲线是凸轮滑道的中间线,即滚子中心的运动轨迹,它由四个部分组成:
(1)AB段圆弧部分:以(0,0)为圆心,半径R=133mm的圆弧;
(2)BC段圆弧部分:以(0,80)为圆心,半径为R=53mm的圆弧;
(3)CD段直线部分:过(53,0)点,平行于Y轴的直线;
(4)DA段圆弧部分:以(-20,-56.5)为圆心,半径R=73mm的圆弧。
用SolidWorks三维建模软件建立的简化凸轮轨道模型(如图3所示),弹齿模型(如图4所示),曲柄模型(如图5所示)。根据ADAMS软件仿真需要,对建模零件按应有位置进行装配,得到捡拾器简化装配模型(如图6所示)。


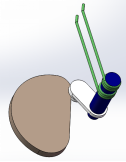
图3 凸轮轨道三维建模 图4弹齿的三维建模 图5 曲柄的三维建模 图6 捡拾器简化装配图
将SolidWorks软件建立的简化的捡拾器装配图保存为Parasolid格式,即*.x_t文件。然后用ADAMS软件读入,并添加约束和驱动。
如图7所示,建立连杆,连接管轴和凸轮大圆圆心并铰接(revolute)。将弹齿、管轴、曲柄固结(fixed)在一起,使弹齿与曲柄保持夹角 。滚轮与凸轮连接处应建立凸轮副,但导入模型无法选择curve,因此必须将凸轮建立滑道并与滚轮建立接触副(contact)。凸轮与大地(ground)建立移动副(translational)并添加直线驱动(translational joint motion)。凸轮与大圆圆心铰接处加上旋转驱动(rotational joint motion)。
。滚轮与凸轮连接处应建立凸轮副,但导入模型无法选择curve,因此必须将凸轮建立滑道并与滚轮建立接触副(contact)。凸轮与大地(ground)建立移动副(translational)并添加直线驱动(translational joint motion)。凸轮与大圆圆心铰接处加上旋转驱动(rotational joint motion)。
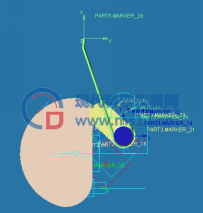
图7 对导入ADAMS的装配图加约束
3 ADAMS仿真分析
设置ADAMS仿真参数,驱动MOTION_1 (滚筒的转速)为60r/min,驱动MOTION_2(联合机的前进速度)为0.9m/s,仿真时间为2s,仿真步数设置为50。对装配体进行运动仿真,由此得到捡拾器的四个运动状态(如图10所示)。对弹齿顶端的X方向的线速度、弹齿顶端角速度进行运动仿真分析,得到齿端的X方向的线速度变化(如图8所示),及齿端的角速度变化(如图9所示)。
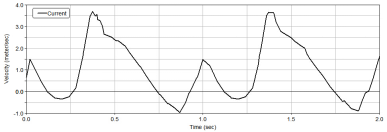
图8 齿端的X方向线速度变化
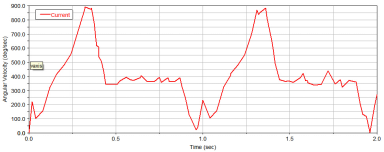
图9 齿端角速度变化
由图8,图9分析可知:当t=0~0.3s时,齿端角速度迅速增大,弹齿迅速从护板中伸出,可使弹齿迅速深入牧草;当t=0.3~0.5s时,齿端角速度减小,齿端线速度也随之降低,便于尽可能多的捡拾牧草;当t=0.5~0.8s时,捡拾器处于牧草抬升状态,齿端角速度基本保持不变,有利于秸秆的平稳运送;当t=0.8~1.0s时,齿端角速度迅速下降,同时齿端的X方向线速度迅速增大,可迅速完成收齿动作。当t=0.8~0.9s时,弹齿动作处于收齿状态,此时 ,可使秸秆与弹齿迅速脱离,弹齿进入下一个运动阶段。
,可使秸秆与弹齿迅速脱离,弹齿进入下一个运动阶段。
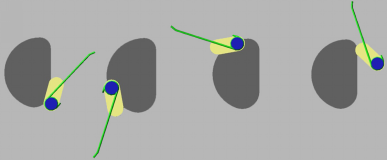
图10 捡拾器4个运动姿态
通过运动仿真可知,捡拾器的工作过程大致分为放齿、捡拾、抬升、输送和收齿这几个阶段。图10为捡拾器的4个基本运动姿态,分析凸轮运动可总结出捡拾器的基本运动规律。
第一阶段为放齿运动,收缩进护板的弹齿迅速伸出,弹齿齿端线速度开始增加,角速度也随之增大。随着弹齿完全伸出护板,齿端线速度和角速度都减小,弹齿以较小的运动速度深入草料中,可避免将物料打散。放齿完成后进入物料捡拾阶段,此时凸轮处于远休止状态,角速度和相对线速度保持不变。捡拾阶段和物料抬升均处于角速度不变的状态,并且抬升过程中弹齿保持近似水平,便于物料的平稳提升。当物料被抬升到最高点,弹齿向滚筒后方推送物料并收齿,此时弹齿略微后倾,弹齿摆动速度逐渐减小,便于物料与弹齿的脱离,之后弹齿迅速收缩进护板,避免阻挡了下一组弹齿运送过来的物料[6]。
4 结论
本文用SolidWorks对一种弹齿滚筒捡拾装置进行了简化建模与装配,并利用ADAMS对简化模型进行运动学和动力学仿真分析,得到了相应的速度图线和运动姿态。通过分析产生的数据图,便于对捡拾器进行优化设计。仿真结果验证了其设计合理性,为研发适用于收集农业秸秆的捡拾器提供了方法和依据。
参考文献
[1] 乌吉斯古楞,刘伟峰,包那日那.滚筒式捡拾器的运动仿真[J].农机化研究,2010(9):56-59
[2] 王国权,余群,卜云龙,于德年,王彩梅.秸秆捡拾打捆机设计及捡拾器的动力学仿真[J].农业机械学报,2001(5):60-62+69
[3] 王文明.弹齿滚筒式捡拾装置参数分析和改进设计研究[D].内蒙古农业大学,2012
[4] 孙贵斌,孙召瑞,吴修彬,等.基于COSMOSMotion的弹齿滚筒捡拾器运动仿真[J].农业装备与车辆工程,2010(8):37-39
[5] 王文明,王春光.弹齿滚筒式捡拾装置参数分析与仿真[J].农业机械学报,2012(10):82-89
[6] 王振华,王德成,刘贵林,等.方草捆压捆机捡拾器参数设计[J].农业机械学报,2010(0):113-115

关注本网官方微信 随时订阅权威资讯
